西門子S120控制器模塊6SL3040-0NA00-0AA0 西門子S120控制器模塊6SL3040-0NA00-0AA0 
潯之漫智控技術(上海)有限公司 上海詩慕自動化設備有限公司
本公司銷售西門子自動化產品,*,質量保證,價格優勢
西門子PLC,西門子觸摸屏,西門子數控系統,西門子軟啟動,西門子以太網
西門子電機,西門子變頻器,西門子直流調速器,西門子電線電纜
我公司大量現貨供應,價格優勢,*,德國* 6SL3040-0NA00-0AA0***備件*** 基于 SIMOTION Drive 的 控制器擴展模塊 CX32; 整流器控制單元 用于比例縮放 驅動軸 SIMOTION D4x 5; 接口:4 DI,4 DI/DO 4 個 Drive-CLiQ 一、概述
S120 有兩種形式:
用于多軸系統的 DC/AC 裝置
用于單軸系統的 AC/AC 裝置 這兩種形式的 Firmware V2.4 及以上版本都已具備基本定位功能。當前V2.4 版本的 S120具有如下定位功能:
? 點動 (Jog): 用于手動方式移動軸,通過按鈕使軸運行至目標點
? 回零 (Homing/Reference):用于定義軸的參考點或運行中回零
? 限位 (Limits):用于限制軸的速度、位置。包括軟限位、硬限位
? 程序步 (Traversing Blocks): 共64個程序步,可自動連續執行一個完整的程序也可單步執行
? 直接設定值輸入/手動設定值輸入 (Direct Setpoint Input / MDI):目標位置及運行速度可由上位機實時控制。 使用 S120 基本定位功能的前提條件:
調試軟件:Starter V4.0 或更高版本 / SCOUT V4.0 或更高版本
硬件版本:SINAMICS FW: V2.4 HF2 或更高版本 注:
安裝 SCOUT V4.0 需要STEP 7 版本至少為 V5.3.3.1 以上 二、激活基本定位功能
S120的定位功能必須在變頻器離線配置中激活,步驟如下: 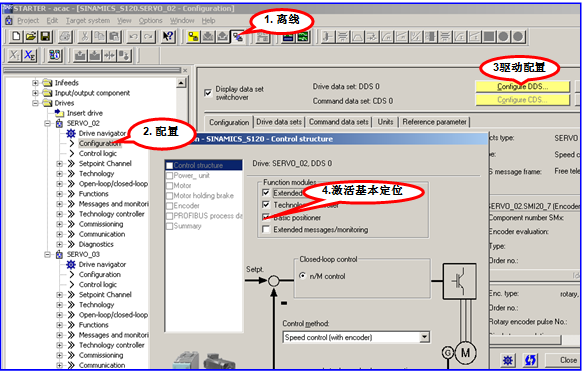
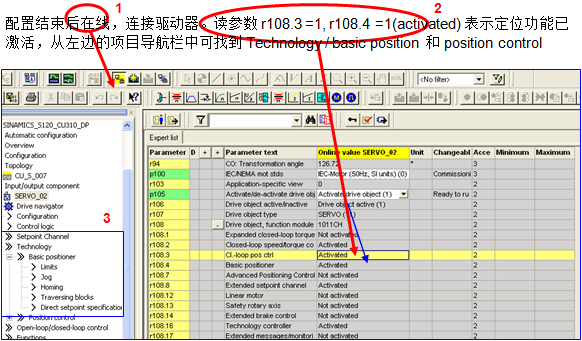
定位功能激活后可使用STARTER中的控制面板或參數表進行設置 定位功能激活后可使用STARTER中的控制面板或參數表進行設置 使用控制面板 使用參數表 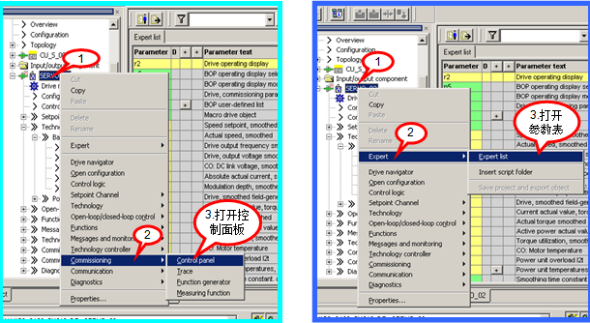
使用控制面板的操作步驟: 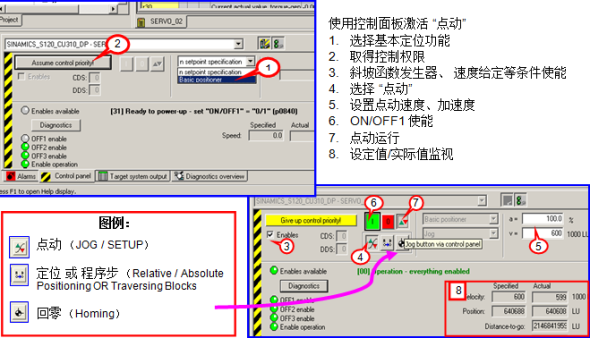
三、基本定位_點動(JOG) S120 中基本定位功能的點動有兩種方式:
? 速度方式( travel endless):點動按鈕按下,軸以設定的速度運行直至按鈕釋放。
? 位置方式( travel incremental):點動按鈕按下并保持,軸以設定的速度運行至目標位置后自動停止。 ? 使用控制面板的點動功能僅限于速度方式,位置方式需使用參數表設定。 ? 執行點動功能,應先使能變頻器ON/OFF1(P0840) 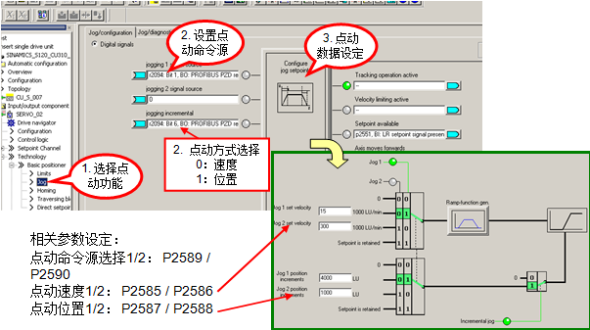
四、基本定位_回零(Homing / Reference)
回零/尋參(Homing / Reference)
回參考點模式(回零模式)只有使用增量編碼器(旋轉編碼器 Reserver、正/余弦編碼器Sin/Cos 或 脈沖編碼器)時需要,因每次上電時增量編碼器與軸的機械位置之間沒有任何確定的關系。因此軸都必須被移至預先定義好的零點位置。即執行 Homing 功能。
當使用編碼器 ( Absolute ) 時每次上電不需重新回零。
S120 中回零有三種方式:
? 直接設定參考點 (Reference): 對任意編碼器均可
? 主動回零 (Reference point approach): 主要指增量編碼器
? 動態回零 (Flying Reference):對任意編碼器均可 4.1設置參考點 (Set_Reference)
通過用戶程序可設置任意位置為坐標原點。通常情況下只有當系統即無接近開關又無編碼器的零脈沖時,或者當需要軸被設置為一個不同的位置時才使用該方式 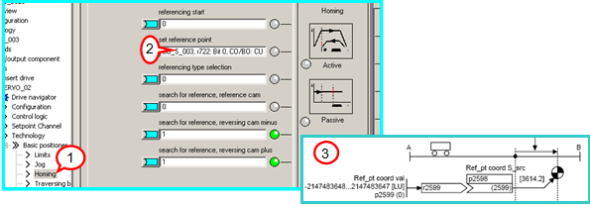
操作步驟(已設定開關量輸入點 DI2 為ON/OFF1命令源 P840)
1. 進入“Homing”
2. 連接一數字量輸入點 ( DI 1 )至參數 P2596作為設置參考點信號位,該位上升沿有效
3. 設定參考點位置坐標值 P2599(如 0)
4. 閉合DI 2運行使能
5. 閉合DI 1 激活“設置參考點”命令,于是該軸當前位置 r 2521 立即被置為P2599 中設定的值。如 r2521=0 4.2主動回零(Active Homing)
主動回零方式只適用于增量編碼器,編碼器只需在初始化階段進行編碼器校準,以后不必做回零 主動回零有三種方式:
僅用編碼器零標志位( Encoder Zero Mark ) 回零
僅用外部零標志( External Zero Mark ) 回零
使用接近開關 + 編碼器零標志位( Homing output cam + Zero Mark ) 回零 4.2.1編碼器的主動回零
如果我們使用編碼器并且作主動回零時會看到如下頁面: 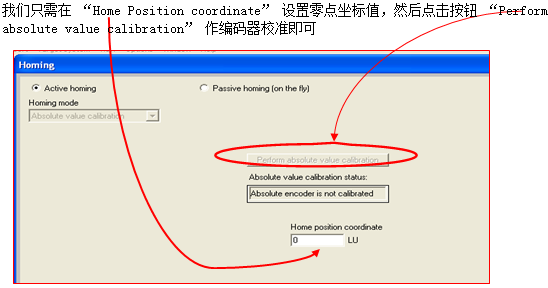
| 